 泵閥商務網
泵閥商務網










詳細介紹
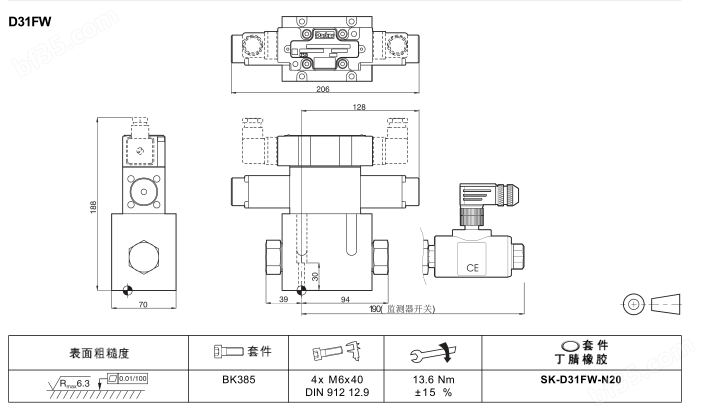
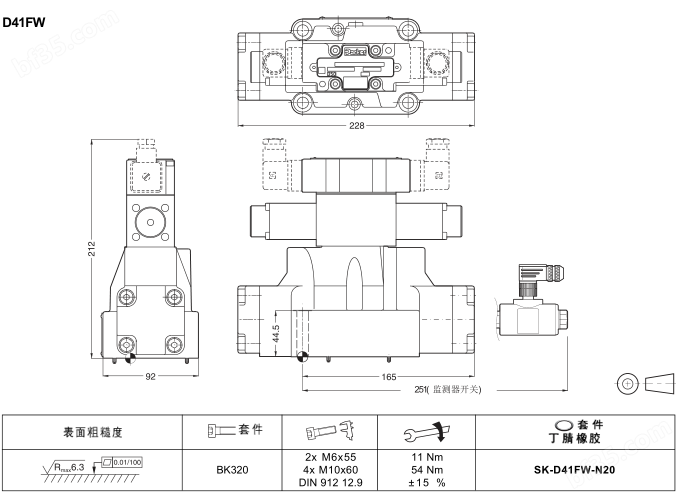
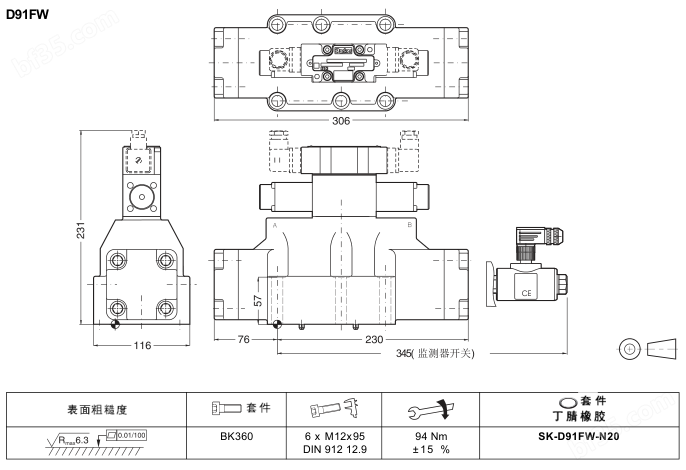
美國包郵PARKER派克先導式比例方向控制閥
美國Parker派克先導式比例方向控制閥D31FW系列型號 或者其他型號系我
蘇州錦幕機電有限公司;柱塞泵 葉片泵 齒輪泵 電磁閥 溢流閥 比例閥
D31FWE01CC1NLW8 D31FWE01CC2NLW0 D31FWE01CC2NLW8 D31FWE01CC4NLW0
D31FWE01CC4NLW8 D31FWE01CC5NLW0 D31FWE01CC5NLW8 D31FWE01FC1NLW0
D41FWB32HC4NLW8 D41FWE02FC2NLW0 D41FWB31FC2NLW8 D41FWB31FC4NLW0
D41FWB31FC1NLW8 D41FWB31FC2NLW0 D41FWB31CC5NLW0 D41FWB31FC1NLW0
由于錯誤診斷系統的復雜性,將神經網絡利用于障診斷系統的籌劃中,將是大規模神經網絡的結構和學習成就。為了減少工作的復雜性,減少網絡學習時間,本文將錯誤診斷知識湊集分解為幾個邏輯上獨立的子湊集,每一個子湊集再分解為若干規則子集,爾后根據規則子集來結構網絡。每個規則子集都是一個邏輯上獨立的子網絡的映射,規則子集間的系,經過進程子網
D91FWE01HC4NLW0 D91FWB32HC1NLW0 D91FWE01FC5NLW0 D91FWE01FC4NLW8
D91FWB32HC5NLW8 D91FWE02FC4NLW0 D91FWE01HC5NLW8 D91FWE01FC5NLW8
D31FWE02FC4NLW0 D31FWE02FC4NLW8 D41FWB31CC1NLW0 D41FWB31CC2NLW8
絡的權系矩陣表示。各個子網絡獨立地利用BP學習算法分別結束學習演習。由于分解后的子網絡比原來的網絡規模小得多且成就局部化了,從而使演習時間大為減少。利用集成BP網絡結束液壓泵軸承錯誤診斷的信息處理能力源于神經元的非線性機理特性和BP算法,每一個子網絡均為一個BP網絡,各個子網絡由BP算法各自學習,學習后的結果由控制網絡集成。BP網絡的學習算法如 把選取的每一個特性參數(包括能量特性,幅值特性和倒譜包絡特性)x的值映像到神經網絡輸入輸入層的單個節點上,并對其結束正則處理:
xi=0.8(x-xmin)/(xmax-xmin)+0.1 (8)式(8)把特性參數正則到(0.1,0.9)之間的目的是避免Sigmoid函數輸入值
美國包郵PARKER派克先導式比例方向控制閥

 泵閥商務網
泵閥商務網